学生チャレンジプロジェクトチームが水中ロボットコンペティションで部門優勝
8月23~24日、国立研究開発法人海洋研究開発機構(JAMSTEC)横須賀本部で開催された国内最高レベルの水中ロボット競技会「水中ロボットコンベンション in JAMSTEC 2025」に、本学の学生チャレンジプロジェクト「海洋探査ロボットプロジェクト」(指導教員・内田敬久機械学科教授)から6チームが参加し、ビデオ部門優勝・準優勝、フリー部門で準優勝などの成績を収めました。
同コンベンションには、機械学科と電気学科の学部生・院生たちが参加を続けており、優勝などの成績を収めた2020年大会以来、5年連続での成果となりました。古橋秀夫電気学科教授は、水中ロボットコンベンション in JAMSTECの運営委員としても参加しています。
開催日
2025年8月23日(土)・24日(日)
場所
国立研究開発法人海洋研究開発機構(JAMSTEC)横須賀本部
参加者
- 知的計測制御研究室(古橋秀夫電気学科教授)
羽木 大騎さん(工学研究科博士前期課程電気工学専攻1年)
阪田 拓斗さん(工学研究科博士前期課程電気工学専攻1年) - 知能集積システム研究室(内田敬久機械学科教授)
杉本 幸太郎さん(機械学科機械創造工学専攻4年)
松永 育也さん(機械学科機械創造工学専攻2年)
機体内容
Return Zero
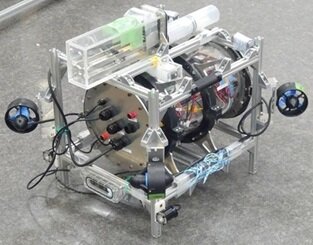 |
スクリュー推進方式を採用したホバリング型機体である。4 つのスクリューと可変バラスト機構を搭載し水平方向移動と上下移動の 4 自由度の動作を行う。可変バラストによる上下方向の移動を採用することで、スクリューによる上下移動と比較して低消費電力と高い安定性を実現している。可変バラスト機構について、システム同定を行い、パラメータを導出し制御することで任意の深度でホバリング行う。スクリューの回転速度とバラストの調整を組み合わせることで、精密な位置制御が可能であり、安定した動作を実現する。この機体は、水中環境における精密な作業にも対応できる設計となっている。また、機体搭載センサーは深度カメラ、深度センサー、IMU、ソナー等がある。
Urashima
 |
テトロン
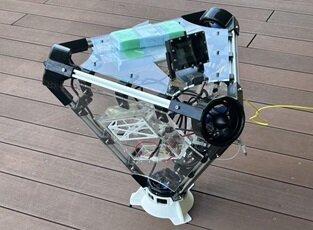 |
テトロンは 4 つのスラスター、制御用基板、カメラ、バッテリーを搭載し、テザーケーブルを介して遠隔操作可能な船底検査用ロボットです。テトロンの形状は正四面体で、各面には目的に合わせて様々な機能を持ったモジュールを取り付けることができます。また、頂点を先頭に進むことで、他の多面体よりも少ない抵抗で進むことができます。各頂点にスラスターを搭載したことで、最小限のモーターの数で全方向に自由移動ができます。また、カメラは1自由度で 70 度の範囲に動かすことができ、広い視野を得ることができます。制御用の基板は Jetson nano を使用しており、複雑な処理を行うことも可能になっています。
LEGNO(レグノ)
 |
成績
- ビデオ部門
優勝「テトロン」
知能集積システム研究室(内田敬久機械学科教授)
機械学科機械創造工学専攻2年・松永育也
準優勝「LEGNO(レグノ)」
知能集積システム研究室(内田敬久機械学科教授)
機械学科機械創造工学専攻4年・杉本幸太郎 - フリー部門
準優勝「Urashima」
知的計測制御研究室(古橋秀夫電気学科教授)
工学研究科博士前期課程電気工学専攻1年・羽木大騎
工学研究科博士前期課程電気工学専攻1年・阪田拓斗 - AIチャレンジ部門
予選通過「Return Zero」
工学研究科博士前期課程電気工学専攻2年・大木貴生
参加者の声
知能集積システム研究室(内田敬久機械学科教授)
工学部機械学科機械創造工学専攻2年・松永育也
参考URL
水中ロボットコンベンション in JAMSTEC 2025