
非接触給電技術で産業機器のワイヤレス化を実現する


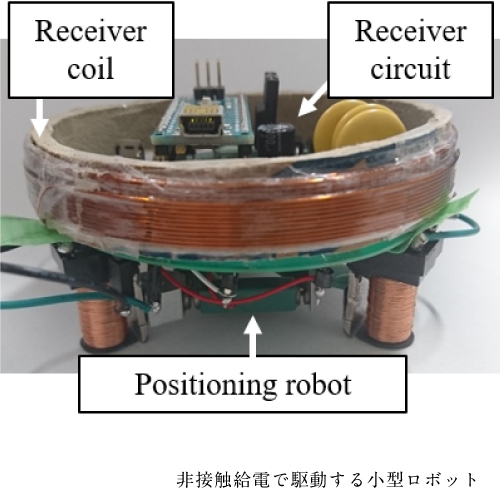
自動周波数調整機能を有した非接触給電システムで駆動する小型ロボット
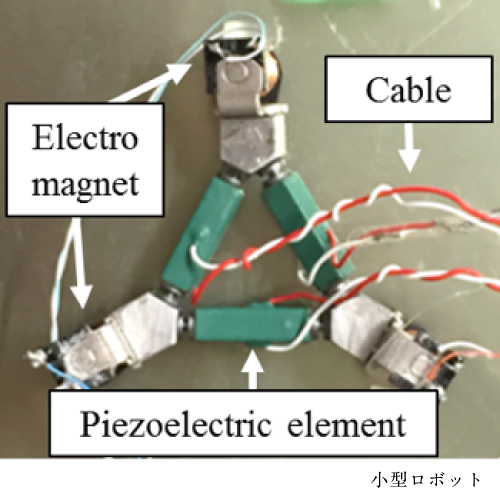
小型ロボットへの電力供給には,バッテリーを搭載するものと電力ケーブルで行うものがある。しかし,バッテリーが供給できる電力は,バッテリーの体積に比例する。バッテリーを大きくすることで小型ロボットの長時間駆動が可能となるが,小型ロボットに大容量バッテリーを搭載することはできない。一方,電力ケーブルは,長時間駆動が可能であるが,ケーブルの剛性と張力がロボットの動きを妨げる。
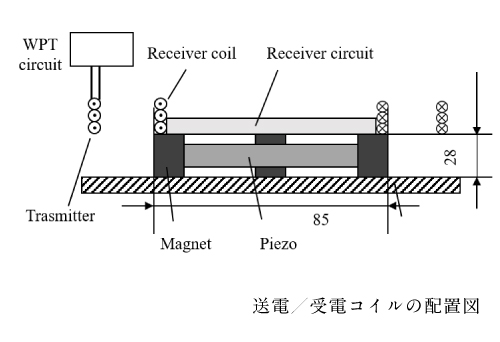
そこで,非接触給電を採用することで上記の問題を解決する。非接触給電には,磁界共振結合方式を採用した。この方式は,従来の電磁誘導方式と比べ送電距離が長く,送電効率も良い。しかし,磁界共振結合方式を使用する場合,負荷やコイル間の距離の変動によって共振周波数が変動し,2次側(ロボット)が受電する電圧も変動することが問題だった。電圧変動は,ロボットにコンバータを搭載して制御することが多いが,小型ロボットの場合,積載する回路は軽量かつ省スペースであることが望ましい。そこで,複雑な制御回路を設ける必要がなく,1次側から共振周波数を自動調整できるATAC(Automatic Tuning Assist Circuit)により,2次側の電圧を一定にすることで,ワイヤレスな小型移動ロボットを実現する。
| 研究 リーダー |
工学部電気学科 准教授 元谷 卓 |
|---|---|
| 研究 分野 |
非接触給電、電力変換機器 |

